地址:山东潍坊

全国客服热线:
生锈和海生物附着是远洋船舶面临的普遍的问题,需要定期清除船板上的铁锈、废旧油漆、附着海生物,以保证船舶的良好工作状态。传统的人工清除属于典型的劳动密集型作业,且存在一些难以克服的弊端,比如高空作业难度大易出现人身伤害,喷砂作业对环境造成污染且危害人身健康,相关用人成本逐年陡增且招工难等。
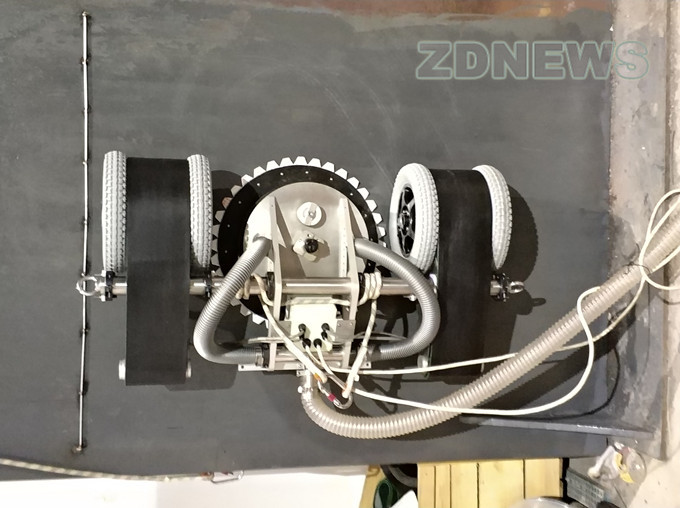
针对这一些难题,近日,浙江大学朱世强教授团队研制的除锈爬壁机器人,成功在浙江省舟山市的金海船务公司交付使用。据介绍,这台除锈爬壁机器人的自重72kg、挂载能力超过100kg,利用超过200兆帕斯卡的超高压水射流除锈(油漆),并利用真空负压同步将废水从船板表面抽到收集设备,从而避免含有铁锈和旧油漆的废水直接流到大海中而造成污染。团队技术骨干、浙江大学海洋学院教师宋伟介绍,在满足SA2.5除锈等级的要求下,这台机器人的最大作业效率81平方/小时、平均作业效率40平方/小时。

这台除锈爬壁机器人是朱世强团队基于10多年的特种机器人和流体动力技术的研究积累,在长达2年、4代机型的测试和实船试验完成了相关研制与实际应用工作。该团队先后突破了单面强吸附永磁组件设计、大负载爬壁机器人轻量化设计、超高压水射流喷嘴空间分布优化、曲面自适应真空废水回收等关键技术。
宋伟介绍,这台机器人首先要解决的是质量与磁性的矛盾,设计一款质量轻、吸附力大的磁铁。“我们通过磁回路和磁铁组件尺寸的优化设计,解决了磁铁的问题。”宋伟说,“还通过机械结构的设计,促进整体机器人轻量化,便于人工搬运。”
爬壁机器人在船表面的吸附原理最简单,但实际应用却要面临十分复杂的情况。不同的船型、焊接与涂装工艺,以及海水对油漆的冲刷程度,都会影响爬壁机器人的工作性能。朱世强团队遇到过一条越南散货船,焊缝做得很高,一不小心就会卡住。“这些凸起和曲面会影响真空密封效果,从而削弱真空回收的能力。因此,需要在真空回收区域设计密封装置,该密封装置同时要能适应凸起和曲面,来保证真空回收效果。”宋伟说。
浙江舟山是我国重要的船舶修造基地和石化储运基地。除了船舶,该款机器人还能够适用于石化储罐的壁面维护。目前,舟山拥有石化储罐近3000万立方,当相关原油储备基地建成后,储罐容量将达上亿立方。这对于浙江大学的这款除锈爬壁机器人来说,大有用武之地,可以很好地支撑舟山当地产业,也将在实际应用中积累更多经验,得到快速地升级成长。
宋伟介绍,更大负载能力、更高作业效率的机型已在样机装配阶段,水陆两栖机型将在今年底完成样机研制。依托浙江大学多学科优势,未来除锈爬壁机器人还将加入更多人工智能技术,通过基于多传感器信息融合,能够检测清洗的效果,进而规划自己的路径、优化系统作业参数,实现作业效率最优化。“爬壁机器人作业过程就像刷油漆一样,相邻两道清洗痕迹重叠得越少,作业效率越高。同时,不同的油漆牌号和涂装工艺,又需要爬行速度、水压、喷嘴转速等系统参数可以依据实际清洗效果来自动调整与优化,这样对作业效率的提高也是很有必要的。我们大家都希望通过人工智能技术的应用,充分的发挥机器人的潜能,把平均效率做进一步的提升。”宋伟说。
目前,该团队已申请相关专利近20项,获得了地方政府、投资机构的资金支持,即将开展知识成果转化和产业化。
地址:山东潍坊