地址:山东潍坊

全国客服热线:
在大疆无人机垄断全球80%市场的情况下,其他各个无人机研发机构都在努力寻找一条不同于大疆的发展方向。合肥徽自机器人无人机研发团队在自研产品“巡检抓取一体化无人机系统”参展后,与其他无人机研究院和高校实验室老师进行了深入交流,大家反馈目前使用的基于实验的开发和测试虽然直接,但是存在安全、空间、时间和成本等诸多痛点:
首先操作飞行过程危险,特别对于工程师和在校学生;其次室内空间又寸土寸金,而室外空域又难申请;另外无人机前期通常不稳定,调试测试时间花费巨大,并且大部分时间花费在硬件调试而非算法;最后硬件成本高,调试过程经常摔机,并且硬件更新换代时间快。面对上述的需求和不足,目前亟需一款面向无人系统开发、仿真及测试的全流程软件生态系统或工具链。
于是合肥徽自机器人无人机研发团队成立专门攻关小组来设计一款全新的无人机开发和测试平台,在团队原有无人机技术的基础上进行改造升级,经过长时间的努力,最终推出了自主研发的智能姿态控制平台智慧教育无人机设备的领跑者。
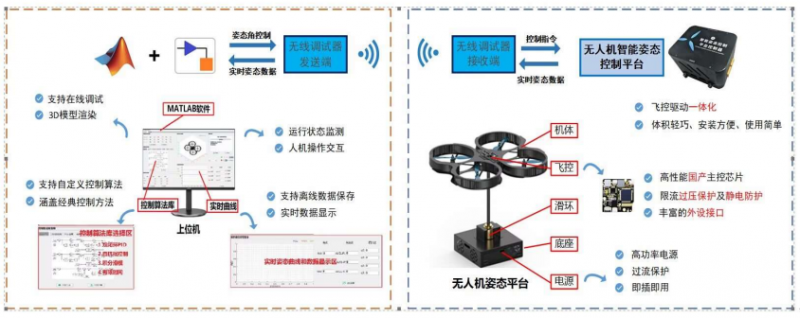
徽自无人机平台控制器内部集成飞控主板、无刷电调以及高速无线通讯模块,其中核心飞控设计采用国产化芯片方案,拥有自主知识产权。在电路设计上加入了热插拔、防静电、电源防反接等常用保护功能,并同时附带RGB灯显示、IMU机械减震等独特设计。

平台控制算法库集成了多种常见的姿态控制算法(包括PID、自抗扰控制、滑模控制、反步法控制等),供研究人员选择进行对比实验。利用智能姿态控制平台,研究人员可以更专注于自己的控制算法,而不用花费时间和精力 去组装实验平台、实现已有算法。
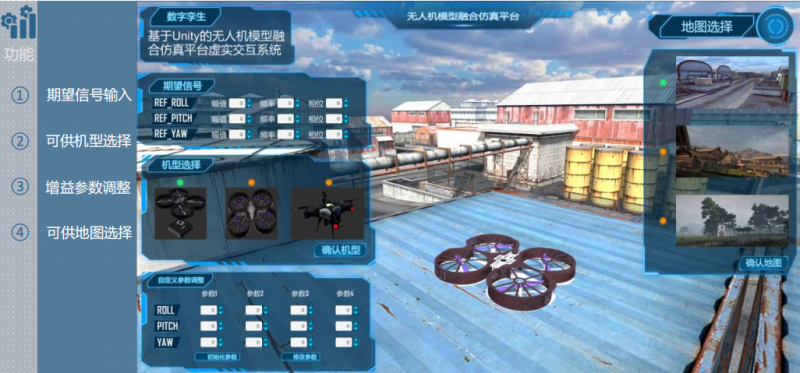
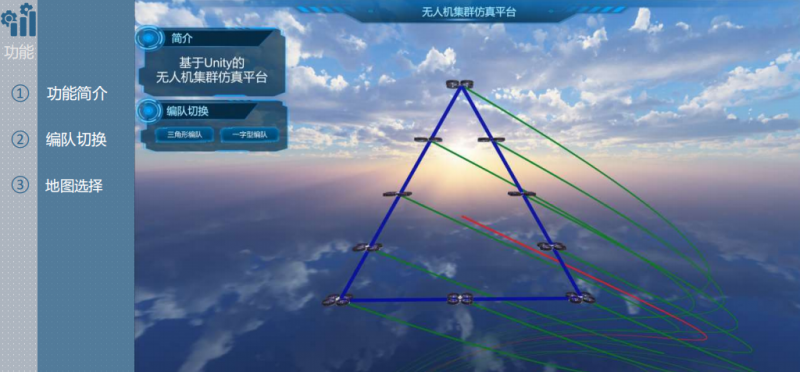
模型融合仿真平台为无人机智能姿态平台建立开放、可升级的核心算法仿真研究环境,该环境聚焦于无人机的任务属性和群控属性,解决需求论证、场景构想、算法设计、系统论证等问题。通过三维渲染的手段渲染出无人机飞行的场景,可提供一个逼真的、高沉浸 感的三维环境,能有效地提高模拟训练的效果。
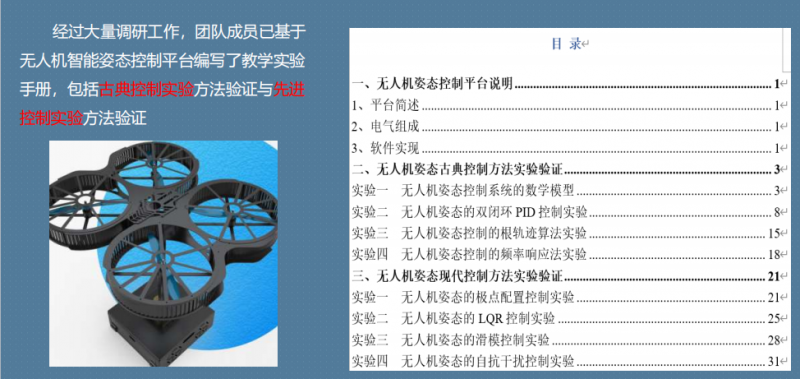
经过大量调研工作,团队成员已基于无人机智能姿态控制平台编写了教学实验手册,包括古典控制实验方法验证与先进控制实验方法验证,引领教育。
经过实际高校和研究所投放使用反馈,与传统实验平台相比,以无人机智能姿态教研平台为载体的科研学习可以有效提升学生的科研兴趣。无人机智能姿态教研平台不仅在高校学科建设中深受广大学生喜爱,同时在各类学术会议与展会中也崭露头角,吸引了科研学者们的广泛关注,并对其提出了众多建设性意见,为姿态平台的进一步完善提供参考。
作为未来的自动化实验室设备,徽自无人机智能姿态控制平台在无人机研究领域将大量应用,其综合社会效益和经济效益十分显著。
合肥徽自机器人技术有限公司是中科大与合工大师生联系组建,目前研发团队内有教授2人,博士研究生6人,硕士研究生11人,公司名字徽自是安徽自动化的缩写,核心产品是AMR自主移动机器人和无人机。团队聚焦电力、铁路、新能源、医疗、光伏、3C、教育等细分领域,持续推出更多定制化产品。
地址:山东潍坊